APLIKASI MACHINE LEARNING
Implementasi Kendali PID Menggunakan Jaringan
Syaraf Tiruan Backpropagation
Dewantoro, G., & Sukamto, J. N. (2019). Implementasi Kendali PID Menggunakan Jaringan Syaraf Tiruan Backpropagation. ELKHA: Jurnal Teknik Elektro, 11(1), 12-18.
1.Abstrak [Kembali]
Jaringan syaraf tiruan adalah salah satu representasi dari Artificial Intelligence yang dapat melatih suatu sistem menjadi cerdas. Pada penelitian ini, jaringan syaraf tiruan akan dilatih dengan metode Backpropagation untuk menggantikan pengendali konvensional, yaitu pengendali PID yang diimplementasikan dengan Matlab. Dataset pelatihan jaringan syaraf tiruan diambil dari input dan output pengendali PID pada sebuah sistem closed loop. Dengan setpoint dan plant yang sama, jaringan syaraf tiruan dapat memiliki unjuk kerja yang menyerupai pengendali PID. Pengujian dilakukan dengan tools simulink di Matlab. Hasil data yang dilatih dapat dilihat dari grafik dan parameter pelatihan. Pada parameter pelatihan dapat menunjukkan jumlah epochs, validation checks dan gradient descent, sedangkan hasil grafik dapat menjelaskan informasi Performance, Training State dan Regression. Percobaan dilakukan dua kali, dengan gangguan luar dan tanpa gangguan luar. Hasil percobaan akan membandingan kestabilan dan kehandalan terhadap gangguan dari luar dibandingkan dengan pengendali PID.
Kata Kunci: Artificial Intelligence, jaringan syaraf tiruan,
backpropagation, pengendali PID
Pengendali Proportional, integral, dan derivative (PID) merupakan sebuah pengendali konvensional yang mencakup hampir semua pengendali yang ada di sektor industri. Pengendali tipe ini memiliki banyak kelebihan dibandingkan tipe - tipe pengendali lain seperti implementasinya yang relatif mudah serta tidak menggunakan sumber daya yang ekstensif. Namun, salah satu kekurangan dari pengendali ini adalah parameter pengedali PID harus diatur secara manual dengan menggunakan teknik - teknik konvensional.
Pada penelitian ini, JST yang ringan akan akan dieksplorasi untuk mengetahui potensinya sebagai pengendali dengan data pelatihan dari pengendali PID. Pengendali PID dipilih sebagai acuan karena saat ini masih menjadi pilihan utama sebagai pengendali konvensional di level industri. Berbagai unjuk kerja kendali digunakan sebagai parameter pembandingan, termasuk tanggapan waktu dan kehandalan terhadap gangguan luar. Apabila unjuk kerja JST dapat menyamai pengendali PID, maka pengembangan lebih lanjut akan memungkinkan untuk menerapkan kendali cerdas pad sebuah sistem proses.
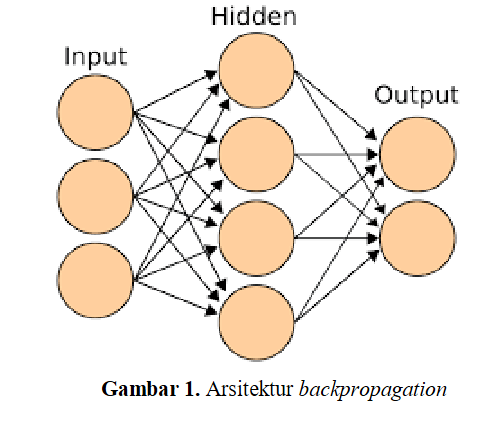
Metodologi yang akan digunakan untuk melatih JST ialah dengan menggunakan Backpropagation untuk mengatur bobot-bobot dari inputan JST. Data yang digunakan sebagai input JST adalah data input dan output dari pengendali PID yang didapat melalui hasil simulaasi aplikasi simulink. Arsitektur backpropagation sendiri terdiri dari lapisan input, tersembunyi, dan lapisan output bisa dilihat dari gambar dibawah ini:
Fungsi sigmoid memiliki persamaan dan plot sebagai berikut:


Fungsi linear memiliki persamaan dan plot sebagai berikut:
.gif)

4. Hasil dan Pembahasan [Kembali]
Untuk mendapatkan data yang akan digunakan pada pelatihan JST, dilakukan simulasi menggunakan PID controller pada simulink dengan menggunakan view log tools pada simulasi tersebut

Langkah selanjutnya ialah memasukkan data hasil simulasi simulink kedalam workspace dan ubah namanya menjadi input dan output


Kemudian ubah nama variabel dari output menjadi target. Hal ini dilakukan sebelum proses pelatihan dilakukan

Lalu buka tools matlab nntools untuk mengkonstruksikan jaringan neural network

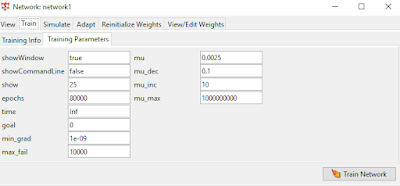
Untuk melatih data data input dan output harus diimport terlebih dahulu dari matlah workspace. Setelah diimport lalu buatlah network latihan dengan berbagai variasi pilihan parameter:

Konstruksi akan menghasilkan gambat dibawah ini:

Pelatihan dilakukan dengan memvariasiikan nilai epochs, min_grad, max_fail dan mu. Lalu jaringan syaraf tiruan backpropagation berhenti pada saat mencapai nilai yang telah ditentukan. Proses latihan dari JST bisa dilihat pada gambar dibawah ini:

Kemdian untuk errornya terdapat performa, training, state, dan regression. Plot - plot ini akan menunjukkan hasil pelatihan dengan menggunakan grafik



Pada plot hasil regresi diatas, bisa dilihat bahwa nilai dari hasil latihan ini sudah akurat dan bisa dijadikan alternatif untuk proses pengendalian plant tertentu.
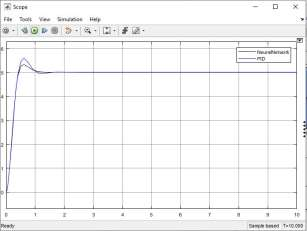
Proses selanjutnya ialah menguji hasil pengendalian yang telah didapat dengan simulink, untuk plant dan pengendalinya bisa dilihat pada gambar dibawah ini:

Percobaan dicoba terhadap dua buah sistem, yakni sistem orde 1 dan orde 2 dengan set point input sebanyak 5. Untuk percobaan pada orde 2 adalah sebagai berikut:
Percobaan pada orde 1 dilakukan dengan penambahan delay transport

dan hasilnya adalah:

Perbandingan antara kinerja PID dengan pengendali JST backpropagation

5. Kesimpulan [Kembali]
JST backpropagation dapat dilatih untuk menyerupai kerja dari pengendali PID konvensional. Berdasarkan unjuk kerja tanggapan waktu, prosentase overshoot pada JST backpropagation lebih kecil dibandingkan pengendali PID.Selain itu rise time JST backpropagation juga lebih cepat. Namun, JST backpropagation belum bisa mengembalikan nilai ke setpoint saat mengkompensasi gangguan dari luar. Jika plant yang digunakan saat pelatihan berbeda dengan saat pengujian, terlihat JST masih memiliki steady-state error yang tinggi.
6. Saran [Kembali]
Untuk meningkatkan akurasi dari neural network, maka untuk kedepannya bisa meningkatkan akurasi dari regresi jaringan syaraf tiruan. Hal ini dilakukan dengan cara mengubah parameter dari network.
7. Realisasi saran [Kembali]
Realisasi saran adalah sebagai berikut:
Perubahan parameter:

 |
8. Daftar pustaka [Kembali]
[1] Lu Y., “Industry 4.0: A Survey on Technologies, Applications and Open Research Issues,” Journal of Industrial Information Integration, vol. 6, pp. 1-10, June 2017.[2] Wajiansyah A., Supriadi, Nur S. Wicaksono A.B., “Implementasi Fuzzy Logic Pada Robot Line Follower,” Jurnal Teknologi Informasi dan Ilmu Komputer, vol. 5, no. 4, pp. 395 - 402, 2018.[3] Timur M.B.B, Gaffar A.F.O, Wajiansyah A., “Desain dan Implementasi Kendali Cerdas untuk Robot Quadpod (Berkaki Empat) – Studi Kasus Robot Pemadam Api (RPA),” Jurnal Teknologi Terpadu, vol. 5, no.2, pp. 140-145,2017.[4] Dewantoro G., Susilo D., dan Adi P.P, “Implementasi Pengendali Logika Fuzzy pada Navigasi Robot Penjejak Dinding,” Majalah Ilmiah Teknologi Elektro, vol. 16, no. 2, pp. 72-77, 2017.[5] Widaningrum L., Setiyono B., Riyadi M. A., ”Perancangan Kontroler Jaringan Syaraf Tiruan B-Spline Berbasis Mikrokontroler Atmega16 Sebagai Kendali Kecepatan Motor Brushless DC (BLDC),” Transient, vol. 6, no. 3, September 2017.[6] Solanki S., “Brushless DC Motor Drive during Speed Regulation with Artificial Neural Network Controller.” International Journal of Engineering Research and Applications, vol. 6, no. 6, pp. 01-05, 2016.[7] He W., David A. O., Yin Z., Sun C.,”Neural Network Control of a Robotic Manipulator with Input Deadzone and Output Constraint,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 46, no. 6, pp. 759-770, June 2016.[8] Sun C.; He W., Hong J.,”Neural Network Control of a Flexible Robotic Manipulator Using the Lumped Spring-Mass Model,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 47, no. 8, pp. 1863-1874, Aug. 2017.[9] Artale V., Collotta M., Milazzo C., Pau G., Ricciardello A., “Real-Time System based on a Neural Network and PID Flight Control”, Applied Mathematics & Information Sciences, Vol. 10 , No. 2, pp. 395-402, 2016.[10] Cheon K., Kim J., Hamadche M., Lee D., “On Replacing PID Controller with Deep Learning Controller for DC Motor System,” Journal of Automation and Control Engineering, vol. 3, no. 6, pp. 452-256, 2015.[11] Zhou J., Shan W., Duan Z., Stability and case studies of linear continuous-time systems under deep belief network controllers,” Proc. in Chinese Automation Congress (CAC), 2017.[12] Muhammad A., “On replacing PID controller with ANN controller for DC Motor Position Control,” International Journal of Research Studies in Computing, vol. 2, no. 1, pp. 22-30, April 2013.[13] Nurmila N., Sugiharto A., Sarwoko E. A.,”Algoritma Back Propagation Neural Network Untuk Pengenalan Pola Karakter Huruf Jawa,” Jurnal Masyarakat Informatika, vol. 1, no. 1, pp. 1-10, December 2010.


Tidak ada komentar:
Posting Komentar